RoboBrain 2.0 : 智谱开源的具身大脑模型
AI智库导航-aiguide.cc为您提供最新的AI新闻资讯和最新的AI工具推荐,在这里你可以获得用于营销的AI聊天机器人、AI在商业管理中的应用、用于数据分析的AI工具、机器学习模型、面向企业的AI解决方案、AI在商业客户服务中的应用、AI和自动化工具等。
主要介绍
RoboBrain 2.0 是北京智源人工智能研究院发布的开源具身大脑模型,作为全球首个集感知、推理与规划于一体的通用具身智能大脑,其32B版本凭借时空认知能力的突破,在多项权威基准测试中全面超越GPT-4o等基线模型。该模型通过模块化架构与多模态数据训练,实现了对复杂物理环境的深度理解,支持多智能体协作与长程任务规划,为机器人从“单机智能”迈向“群体智能”提供了核心引擎。
功能特点
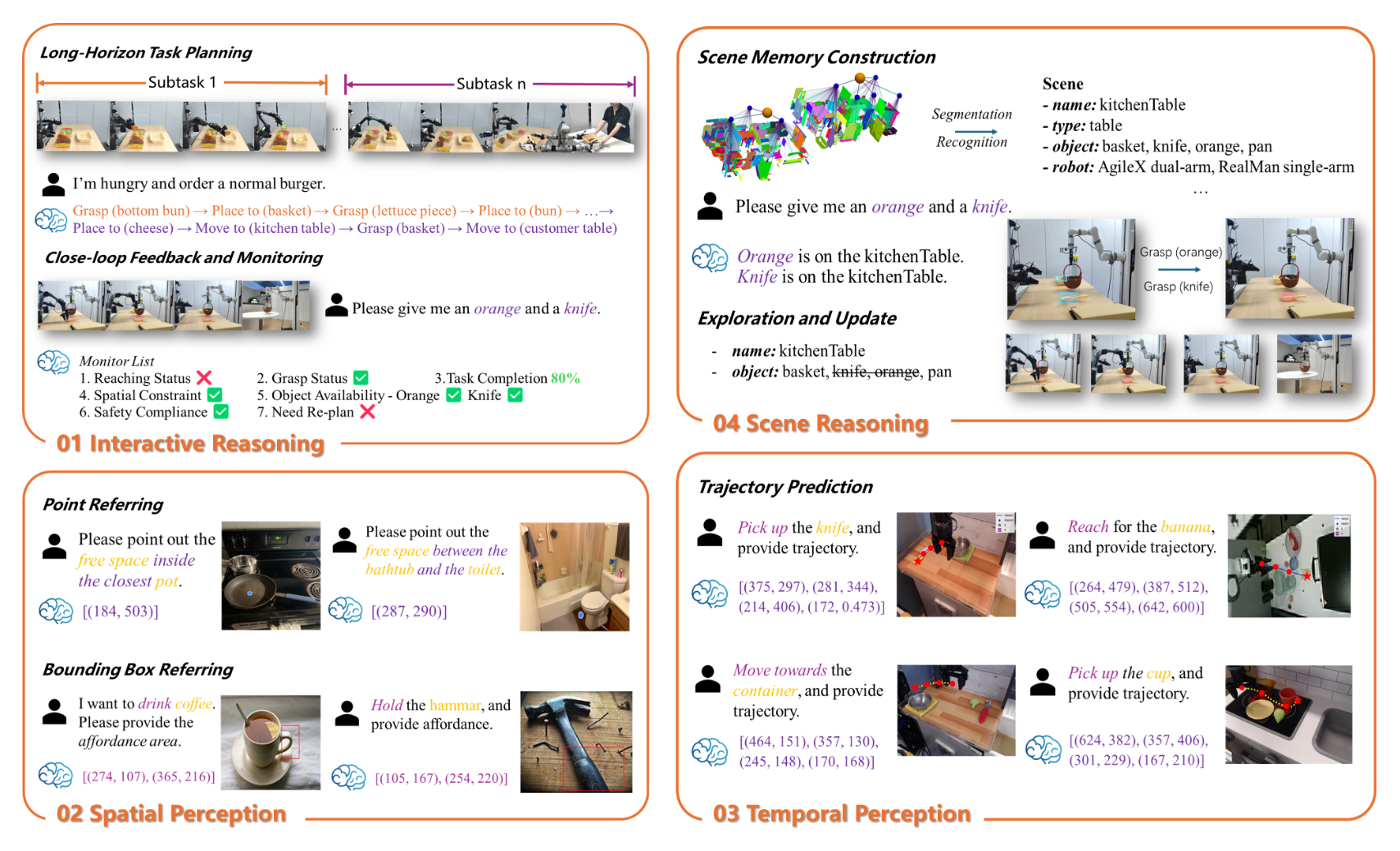
- 时空感知与推理:
- 支持精确点定位、边界框预测及三维空间推理,能够基于场景图实时构建和更新环境模型。
- 通过多模态数据(如高分辨率图像、视频帧、3D场景数据)强化时间建模能力,实现动态环境下的长期规划与闭环交互。
- 多智能体协作:
- 协调多个机器人的行为,完成复杂任务(如跨本体协作搬运、导航)。
- 实验中,睿尔曼单臂机器人、宇树人形G1、松灵双臂机器人通过RoboBrain 2.0成功完成“递送苹果和水果刀”的分工协作。
- 长链推理与决策透明性:
- 支持链式推理与因果逻辑提取,生成决策过程的详细解释,增强模型的可解释性。
- 多模态交互能力:
- 整合标准视觉问答、区域级查询、OCR视觉问答及多轮视觉对话,优化语言表达的多样性与语义一致性。
优缺点
- 优点:
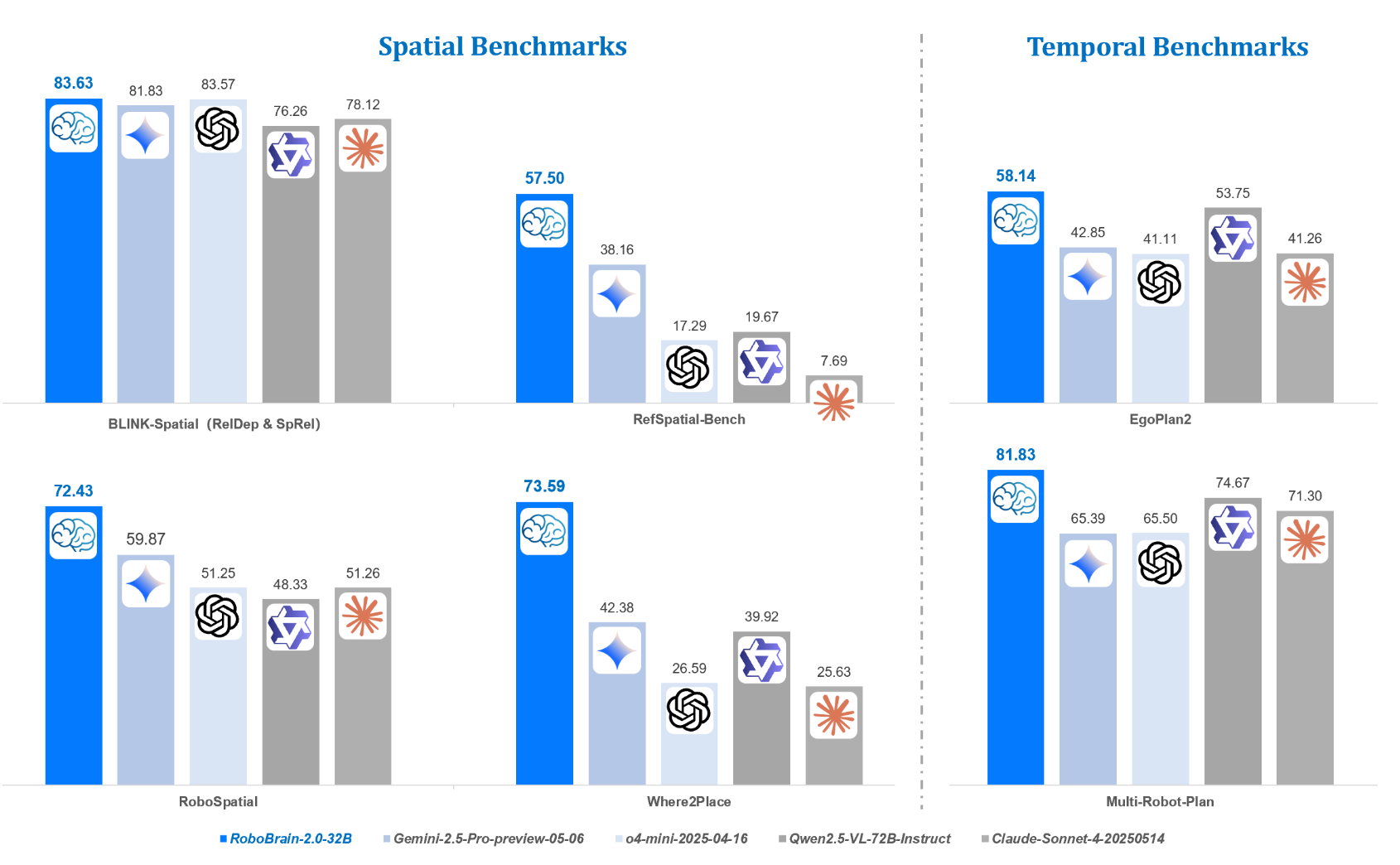
- 性能卓越:在BLINK、CV-Bench等9项空间推理基准测试中屡获SOTA,时间推理能力领跑Qwen2.5-VL、Claude等模型。
- 轻量化部署:7B版本适配边缘设备,可在低资源环境下稳定运行。
- 开源生态:模型权重、训练代码与评测基准全面开源,支持社区开发者贡献技能模块。
- 缺点:
- 依赖云端大脑:部分复杂决策仍需依赖云端RoboBrain模型,端侧自主性受限。
- 生态成熟度待提升:技能商店的模块数量与质量需时间积累。
如何使用
- 部署框架:
- 从GitHub仓库下载开箱即用镜像,通过三行指令完成基础环境搭建。
- 注册机器人本体信息,自动生成与云端RoboBrain大脑的双向通信链路。
- 开发技能模块:
- 使用框架提供的API接口,开发小脑技能(如抓取、避障),并上传至RoboSkill商店。
- 通过MCP协议实现技能的一键部署与版本管理。
- 任务调度与监控:
- 在控制台输入任务指令(如“整理货架”),系统自动拆解为子任务并分配给适配机器人。
- 通过多粒度监控模块实时查看任务进度与机器人状态。
框架技术原理
- 模块化编码器-解码器架构:
- 将高分辨率图像、多视图输入、视频帧、语言指令和场景图编码为统一的多模态标记序列,实现感知、推理和规划的统一处理。
- 三阶段递进式训练流程:
- 基础时空学习:通过密集标注的图文数据、视频问答任务,构建空间感知和时间理解的基础能力。
- 具身时空增强:引入高分辨率多视图图像、第一人称视频数据及导航任务,增强长序列时空信息处理能力。
- 推理链训练:使用多轮推理示例(如长期任务规划、闭环交互)训练模型生成推理链,支持复杂任务的逐步决策。
- MCP协议与无服务器架构:
- 实现大脑云端优化推理部署与小脑技能的免适配注册机制,降低开发门槛。
创新点
- 全球首个具身智能SaaS开源框架:
- 打通智能大脑与异构本体协同通路,支持跨本体协作控制。
- 多本体时空记忆场景图共享机制:
- 支持动态环境下的实时感知与建模,突破传统机器人协作中的“信息孤岛”限制。
- 技能商店生态:
- 构建具身智能领域的“应用商店”,鼓励社区开发者贡献技能模块,形成标准化接口与模块化设计。
评估标准
- 空间推理能力:
- 在BLINK、CV-Bench、Where2Place等基准测试中,评估物体定位、边界框预测及空间参照的准确性。
- 时间推理能力:
- 在多机器人规划、Ego-Plan2、RoboBench等测试中,验证长程规划、闭环反馈及多智能体协作能力。
- 任务完成效率:
- 通过实际场景测试(如工厂生产、物流配送),评估任务规划准确率与端到端响应时延。
应用领域
- 工业制造:多机械臂协同完成零部件搬运与组装,提升生产线柔性。
- 物流配送:地面机器人与无人机协作,实现“最后一公里”动态路径规划。
- 智慧城市:清洁机器人、巡逻机器人、配送机器人协同处理突发事件(如火灾救援、物资运输)。
- 医疗护理:机器人群体协助搬运医疗设备、辅助患者移动,减轻医护人员负担。
项目地址
© 版权声明
文章版权归作者所有,未经允许请勿转载。
相关文章
暂无评论...
AI全网资源导航每日收集国内外热点AI/人工智能/工具/模型/框架以及最新的AI学习资料/课程等,在这个全新的AI时代,助力每一个人,赋能每一个具体业务场景,与所有人一起努力向前!
