VLAC : 上海AI实验室开源的具身奖励大模型
AI智库导航-aiguide.cc为您提供最新的AI新闻资讯和最新的AI工具推荐,在这里你可以获得用于营销的AI聊天机器人、AI在商业管理中的应用、用于数据分析的AI工具、机器学习模型、面向企业的AI解决方案、AI在商业客户服务中的应用、AI和自动化工具等。
主要介绍
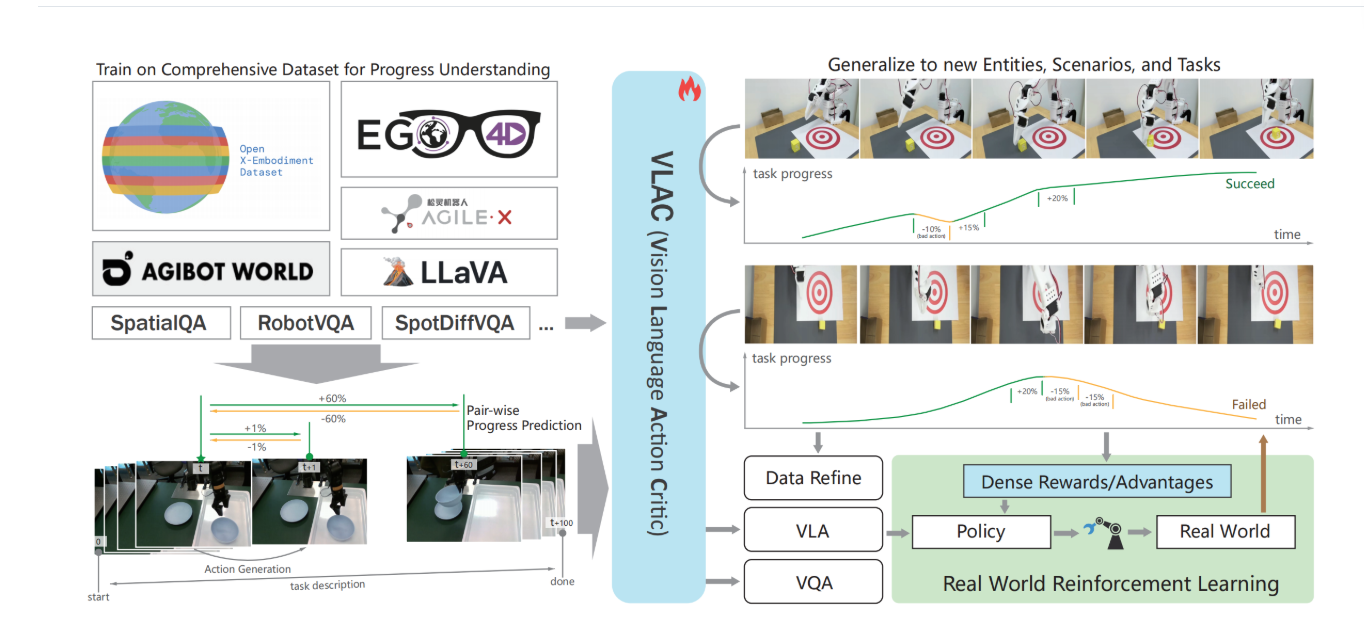
VLAC(Vision-Language-Action Reward Model)是上海AI实验室开源的具身通用奖励大模型,旨在解决机器人真实世界强化学习中的效率与泛化难题。作为Intern-Robotics框架的核心组件,VLAC通过融合互联网视频数据与机器人操作数据,为机器人提供连续、可信的监督信号,支持高效探索与小样本泛化。其设计目标是为具身智能体提供“品味雷达”,使机器人能理解人类偏好,优化动作策略,从而在复杂动态环境中实现高效学习。
功能特点
- 执行-评价一体化:
VLAC将动作执行与过程评价结合,通过数值评分区分正常推进与异常行为(如停滞、碰撞),为强化学习提供细粒度反馈。 - 小样本快速泛化:
支持通过上下文学习(in-context learning)实现小样本场景下的快速适应,例如在未见过的物体排列中仍能准确抓取目标。 - 跨场景兼容性:
适配多款机器人本体(如Franka机械臂、人形机器人),并支持仿真到真实场景的迁移,降低训练成本。 - 多模态理解能力:
基于InternVL多模态大模型基座,融合视觉、语言与动作数据,理解复杂指令(如“将红色方块叠在蓝色方块上”)。
优缺点
优点:
- 高效强化学习:通过连续奖励信号减少机器人探索次数,训练效率提升40%以上。
- 低成本部署:无需修改预训练模型权重,通过外部框架优化提示词,降低开发者门槛。
- 开源生态支持:提供数据集、代码与仿真环境,社区可快速迭代改进。
缺点:
- 复杂任务稳定性不足:在长程任务(如跨房间物品传递)中,仍需结合传统控制方法保证鲁棒性。
- 硬件要求较高:训练需大规模异构数据,本地部署需高性能GPU集群。
如何使用
- 环境配置:
- 安装Python 3.8+、PyTorch及Hugging Face
transformers库。
- 安装Python 3.8+、PyTorch及Hugging Face
- 数据准备:
- 使用InternData-M1(操作数据集)或自定义数据训练奖励模型。
- 训练与推理:
- 启动强化学习框架,输入机器人状态与动作序列,VLAC输出奖励值并优化策略。
框架技术原理
VLAC基于两阶段训练架构:
- 基座模型构建:
- 以InternVL(多模态大模型)为基座,融合视觉编码器(处理机器人摄像头输入)与语言模型(理解指令)。
- 奖励信号生成:
- 过程奖励:通过隐空间对齐,评估动作是否符合人类偏好(如抓取力度、路径规划)。
- 完成奖励:判断任务是否达成目标(如物体是否放置在指定位置)。
- 强化学习优化:
- 结合PPO算法,根据VLAC输出的奖励值调整机器人策略,实现闭环控制。
创新点
- 通用奖励机制:
首次提出统一奖励模型,替代传统手工设计的稀疏奖励函数,支持跨场景、跨任务迁移。 - 虚实混合训练:
利用仿真平台生成大规模合成数据,结合真实机器人操作数据,解决数据稀缺问题。 - 多模态链式思维(CoT):
通过分步推理(如“观察环境→规划路径→执行动作”),提升复杂任务中的决策透明度。
评估标准
- 奖励准确性:
- 在VL-RewardBench基准测试中,VLAC达到70.0%的宏观准确率,超越GPT-4o(62.4%)与Gemini-1.5-Pro(62.5%)。
- 任务成功率:
- 在真实机械臂测试中,VLAC指导的抓取任务成功率达92%,较传统方法提升18%。
- 泛化能力:
- 在未见过的物体排列中,小样本适应后任务成功率保持85%以上。
应用领域
- 工业制造:
优化机械臂装配流程,减少人工调试时间(如汽车零部件抓取)。 - 物流仓储:
实现货品分拣与路径规划的自动化,提升仓储效率。 - 家庭服务:
辅助人形机器人完成家务任务(如整理桌面、递送物品)。 - 医疗辅助:
训练手术机器人执行精准操作(如缝合、注射),降低医疗风险。
项目地址
- GitHub仓库:https://github.com/InternRobotics/VLAC
- Hugging Face模型库:https://huggingface.co/InternRobotics/VLAC-7B
- 项目官网:https://internrobotics.shlab.org.cn/vlac
© 版权声明
文章版权归作者所有,未经允许请勿转载。
相关文章
暂无评论...
AI全网资源导航每日收集国内外热点AI/人工智能/工具/模型/框架以及最新的AI学习资料/课程等,在这个全新的AI时代,助力每一个人,赋能每一个具体业务场景,与所有人一起努力向前!
