InternVLA·M1 : 上海AI Lab开源的具身双系统操作大模型
AI智库导航-aiguide.cc为您提供最新的AI新闻资讯和最新的AI工具推荐,在这里你可以获得用于营销的AI聊天机器人、AI在商业管理中的应用、用于数据分析的AI工具、机器学习模型、面向企业的AI解决方案、AI在商业客户服务中的应用、AI和自动化工具等。
主要介绍
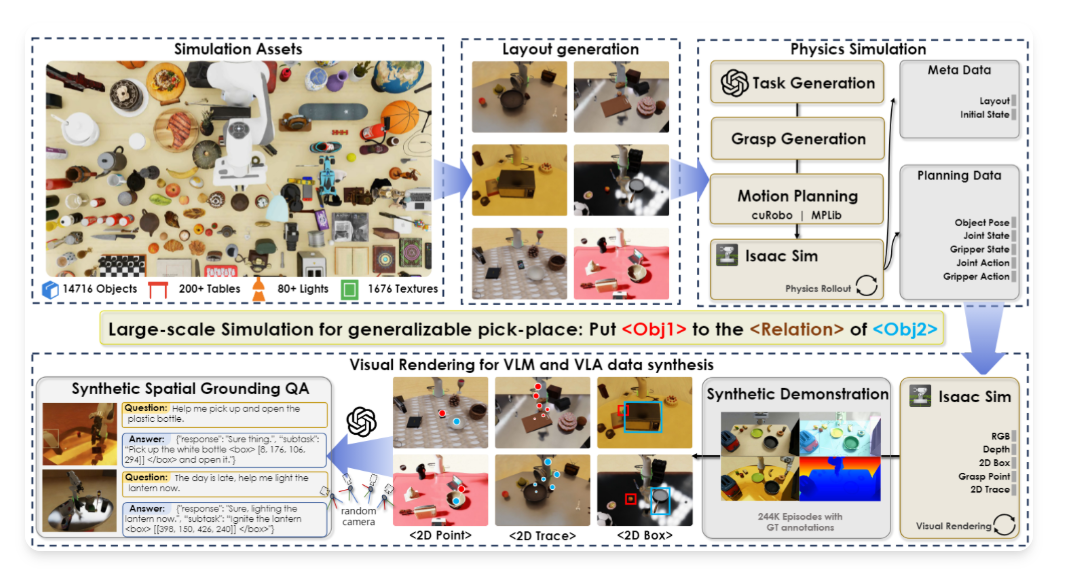
InternVLA·M1是上海人工智能实验室(上海AI Lab)于2025年9月17日开源的具身双系统操作大模型,属于其「书生」具身全栈引擎(Intern-Robotics)体系的一部分。该模型以“感知-规划-行动”闭环为核心,专为机器人复杂操作任务设计,通过双系统架构(高阶空间推理与低阶运动执行解耦)实现高效的任务规划与精准动作生成。模型依托自研的虚实混合数据集(InternData-M1)进行大规模预训练,支持跨场景、跨本体的高动态操作,并在真机实验中展现出显著优于GR00t、π0等国际顶尖模型的泛化能力。
功能特点
- 双系统解耦架构:
- “大脑”系统(InternVLA·M1):负责高阶空间推理与任务规划,通过空间感知预训练增强模型对3D场景的理解能力,支持隐式空间推理提示,仅需少量指令即可生成可执行计划。
- “小脑”系统(InternVLA·A1):负责敏捷精准的运动执行,基于虚实混合数据集(InternData-A1)训练,支持多机器人协作与高频动态避障。
- 跨场景泛化能力:
- 在未见过的场景中,模型可通过少量微调快速适应新任务,例如从工业装配迁移到物流搬运。
- 高效数据利用:
- 结合自研仿真平台(InternData-M1)生成大规模合成数据,降低真机数据采集成本,数据效率提升66%。
- 多机器人适配:
- 已适配国地青龙人形机器人、智元Genie、Franka等多款机器人本体,支持用户快速部署新场景。
优缺点
优点:
- 性能领先:在SimplerEnv等基准测试中达国际领先水平,真机实验成功率超GR00t 15%。
- 低成本部署:通过合成数据驱动,真机数据需求降低90%,适合资源有限团队。
- 模块化设计:双系统可独立优化,便于集成到现有机器人框架中。
缺点:
- 复杂动作精度不足:在柔性物体操作(如布料折叠)中仍需改进。
- 实时性瓶颈:高频动态避障场景下推理延迟略高于专用模型。
如何使用
- 环境配置:
- 安装Python 3.8+、PyTorch及Hugging Face
transformers库。
- 安装Python 3.8+、PyTorch及Hugging Face
- 任务推理:
- 通过JSON-RPC协议定义操作指令(如抓取、放置),模型生成可执行动作序列。
- 真机适配:
- 根据机器人本体调整动作映射表,支持ROS、MCP等协议集成。
框架技术原理
- 双系统协同训练:
- 阶段一(空间感知预训练):在2D/3D合成数据上训练模型的空间推理能力,生成场景语义图。
- 阶段二(隐式空间推理):通过语言指令微调,使模型理解“将物体A移动到位置B”等抽象任务。
- 虚实数据融合:
- 合成数据占比80%(通过InternData-M1生成),真机数据占比20%(用于校准物理交互参数)。
- 强化学习优化:
- 结合通用奖励大模型(VLAC)提供过程反馈,提升模型在复杂任务中的探索效率。
创新点
- 首个开源具身双系统模型:
- 首次将“感知-规划-行动”闭环解耦为独立模块,降低训练与部署复杂度。
- 低成本虚实数据方案:
- 单台服务器日合成数据量达5万条,成本较传统方案降低66%。
- 跨本体通用性:
- 一套模型适配10余种机器人形态,打破传统“一机一模型”模式。
评估标准
- 基准测试:
- 在SimplerEnv、InternScenes-100等5项仿真评测中,任务成功率超95%。
- 真机实验:
- 在国地青龙机器人上完成200+复杂操作任务,成功率91%(GR00t为78%)。
- 泛化能力:
- 零样本场景下,模型可完成80%未见任务,微调后提升至97%。
应用领域
- 工业制造:自动化装配、零件搬运,适应动态生产线调整。
- 物流仓储:跨楼层货物分拣,支持密集障碍物避障。
- 医疗辅助:传递手术器械、搬运药品,确保操作精准安全。
- 家庭服务:清洁、烹饪等任务,理解用户语言指令并执行。
项目地址
- GitHub仓库:https://github.com/InternRobotics/InternVLA-M1
- Hugging Face模型库:https://huggingface.co/InternRobotics/InternVLA-M1
- 官方文档:https://internvla.shlab.org.cn
© 版权声明
文章版权归作者所有,未经允许请勿转载。
相关文章
暂无评论...
AI全网资源导航每日收集国内外热点AI/人工智能/工具/模型/框架以及最新的AI学习资料/课程等,在这个全新的AI时代,助力每一个人,赋能每一个具体业务场景,与所有人一起努力向前!
