InternVLA-A1 : 上海AI实验室开源的具身操作大模型
AI智库导航-aiguide.cc为您提供最新的AI新闻资讯和最新的AI工具推荐,在这里你可以获得用于营销的AI聊天机器人、AI在商业管理中的应用、用于数据分析的AI工具、机器学习模型、面向企业的AI解决方案、AI在商业客户服务中的应用、AI和自动化工具等。
主要介绍
InternVLA-A1 是上海人工智能实验室与国家地方共建人形机器人创新中心联合发布的具身操作大模型,旨在赋予机器人通用3D空间理解与操作能力。该模型融合真实与模拟操作数据,构建了600万条多模态语料的虚实混合数据集,支持跨场景、跨机器人本体的零样本泛化。其“一脑多形”设计可适配方舟无限、国地青龙人形机器人、智元Genie等十余种机器人形态,在真机评测中显著优于同类模型,性能达到国际领先水平。
功能特点
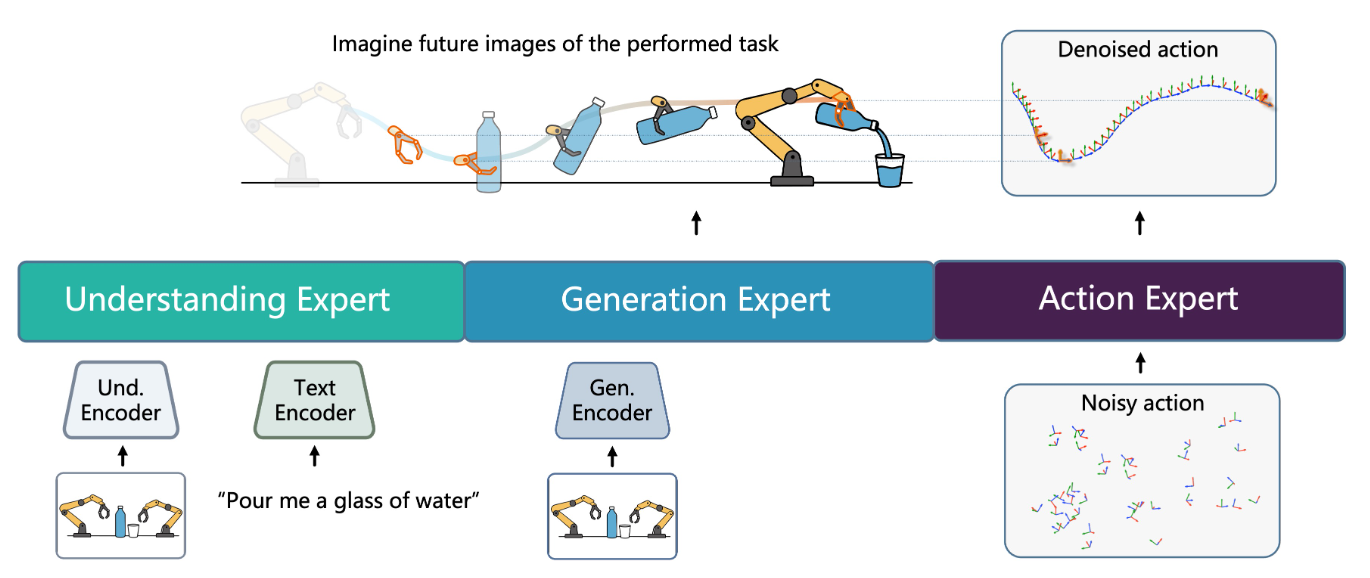
- 理解-想象-执行一体化:精准解析场景与任务需求,规划合理操作路径,并控制机器人完成抓取、搬运、组装等任务。
- 虚实融合训练:结合虚拟仿真数据与真实操作数据,提升模型泛化能力与适应性。
- 多机协作:支持多台机器人协同工作,合理分配任务,适用于复杂场景下的联合操作。
- 动态交互:实时感知环境变化,快速调整动作策略,适应高动态场景需求。
- 跨平台适配:兼容多种机器人本体,降低适配成本。
优缺点
优点:
- 泛化能力强:零样本场景下可直接执行任务,无需额外训练。
- 适应复杂环境:在高动态场景中表现稳定,如避障、突发干扰应对。
- 兼容性高:支持多形态机器人,降低开发门槛。
缺点:
- 数据依赖性:需大规模高质量数据支撑,极端场景数据仍需补充。
- 硬件要求高:实时推理依赖高性能GPU,移动端部署存在挑战。
如何使用
- 在线体验:
-
- 访问 Hugging Face Demo 页面(需等待官方上线),输入文本指令(如“将红色方块放入蓝色盒子”),模型实时生成操作路径并展示机器人执行过程。
- 本地部署:
- 从 GitHub 下载预训练模型,通过 Docker 容器快速启动,连接机器人硬件后,使用 ROS 或 MCP 协议发送任务指令。
- API调用:
- 集成 Hugging Face Inference API,通过网页端或命令行工具直接调用模型服务,适合快速原型开发。
框架技术原理
- 双系统架构:
- 系统2(推理规划):基于空间感知预训练,理解任务目标并规划操作路径。
- 系统1(执行):通过隐式空间推理实现高效动作生成,结合强化学习优化策略。
- 虚实混合训练:
- 利用 Intern·Data-A1 数据集,结合虚拟仿真数据与真实操作数据,提升模型泛化能力。
- 自适应动作网格:
- 将连续动作空间离散化为网格,根据数据分布动态调整,提高推理速度与跨平台适配性。
创新点
- “一脑多形”设计:
- 首次实现单一模型适配多种机器人形态,打破本体壁垒。
- 虚实数据贯通:
- 融合真机实采与虚拟合成数据,数据采集成本降低66%,效率提升3倍。
- 动态交互能力:
- 在高动态场景中实现稳定交互,适应复杂环境变化。
评估标准
- 零样本泛化能力:
- 在未见过的场景中直接执行任务,成功率超90%。
- 任务完成率:
- 真机评测中,复杂任务完成率显著优于 π0 及 GR00T 模型。
- 动态避障效率:
- 在动态障碍物环境中,实时避障延迟低于50ms。
应用领域
- 工业制造:
- 自动化装配、物料搬运、质量检测,提升生产效率。
- 物流仓储:
- 货物分拣、码放、搬运,优化物流流程。
- 医疗护理:
- 辅助患者康复训练、搬运医疗设备,减轻医护人员负担。
- 家庭服务:
- 整理物品、清洁打扫、照顾老人儿童,提升家居便利性。
- 教育科研:
- 作为科研工具进行实验操作与数据收集,辅助教学活动。
项目地址
- GitHub 仓库:https://github.com/InternRobotics/InternVLA-A1
- Hugging Face 数据集:https://huggingface.co/datasets/InternRobotics/InternData-A1
© 版权声明
文章版权归作者所有,未经允许请勿转载。
相关文章
暂无评论...
AI全网资源导航每日收集国内外热点AI/人工智能/工具/模型/框架以及最新的AI学习资料/课程等,在这个全新的AI时代,助力每一个人,赋能每一个具体业务场景,与所有人一起努力向前!
