RoboBrain-X0 : 智源研究院开源的跨本体泛化具身模型
AI智库导航-aiguide.cc为您提供最新的AI新闻资讯和最新的AI工具推荐,在这里你可以获得用于营销的AI聊天机器人、AI在商业管理中的应用、用于数据分析的AI工具、机器学习模型、面向企业的AI解决方案、AI在商业客户服务中的应用、AI和自动化工具等。
主要介绍
RoboBrain-X0是由北京智源人工智能研究院(BAAI)开源的跨本体泛化具身智能基座大模型,旨在解决传统机器人模型对单一硬件的依赖问题。通过统一建模视觉、语言与动作,该模型实现了“一个基座模型,N种身体”的突破,支持多种不同构造的真实机器人(如机械臂、移动底盘、双臂系统等)在零样本或少量样本微调条件下完成复杂任务。其核心目标是为通用具身智能提供可规模化落地的解决方案,推动机器人技术从实验室走向产业应用。
功能特点
- 零样本跨本体泛化:预训练模型无需微调即可直接部署在不同结构的机器人上,完成基础操作(如抓放任务)。
- 小样本微调效应显著:仅需50条任务样本即可适配复杂场景,数据效率提升40%-60%。
- 控制一致性:不同本体执行同一任务时,动作序列高度一致,物理执行可靠。
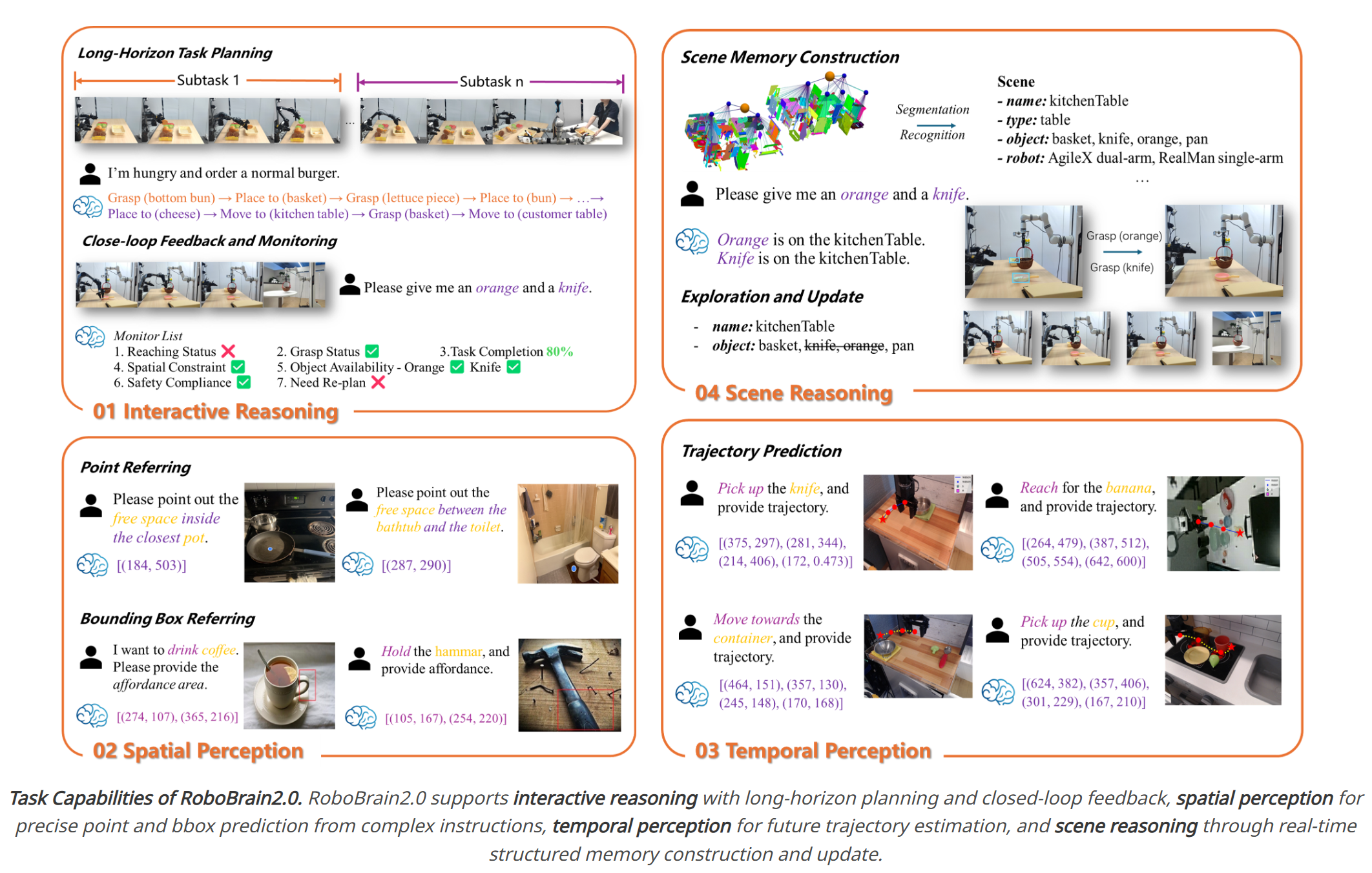
- 分层推理框架:将任务拆解为“意图解析-动作原语推理-控制信号解码”三层,增强可解释性。
- 统一动作表征体系:通过“动作Tokenizer”将连续动作离散化为标准token序列,支持跨本体数据混合训练。
优缺点
- 优点:
- 突破硬件限制,实现智能在不同机器人间的无缝迁移。
- 降低开发成本,避免重复收集数据和训练模型。
- 支持复杂任务拆解,适应动态环境。
- 缺点:
- 对长时程任务和复杂动态环境的适应性仍需提升。
- 模型鲁棒性需进一步优化,以应对极端场景。
如何使用
- 产业应用:工厂可通过统一模型适配不同型号机械臂,降低产线升级成本。
- 服务机器人:家庭或酒店机器人利用零样本能力完成物品递送、清洁等任务。
- 科研与教育:研究者可基于开源模型开发定制化算法;医学院利用其可视化结果进行教学演示。
- 云端部署:通过智源RoboBrain 2.0工具链,开发者可快速调用模型API,无需本地训练。
框架技术原理
- 统一动作空间:将所有机器人的控制信号映射到末端执行器(EE)的三维位姿(位置与姿态),跨越自由度差异。
- 动作Tokenizer机制:基于分组残差量化(GRVQ)对位置、旋转、夹爪等维度压缩,生成可迁移的动作原语token。
- 分层推理架构:
- 高层:解析任务意图,生成子任务链。
- 中层:将子任务转化为动作原语token序列。
- 底层:解码token为具体控制信号(如增量末端位姿)。
- 数据驱动:融合多模态VQA数据、开源动作数据、产业伙伴合作数据及自采高质量轨迹数据,构建覆盖“感知-思考-行动”全链路的数据集。
创新点
- 跨本体统一建模:首次实现异构机器人共享同一套操作原语,支持混合本体数据训练。
- 任务语义与动作解耦:学习“做什么”而非“怎么动”,将任务分解为与硬件无关的通用语义动作序列。
- 动作语义抽象化:通过统一动作表征体系,提升计算效率与长时控制稳定性。
- 开源生态构建:同步开源预训练模型、数据集及技术文档,推动具身智能社区协作。
评估标准
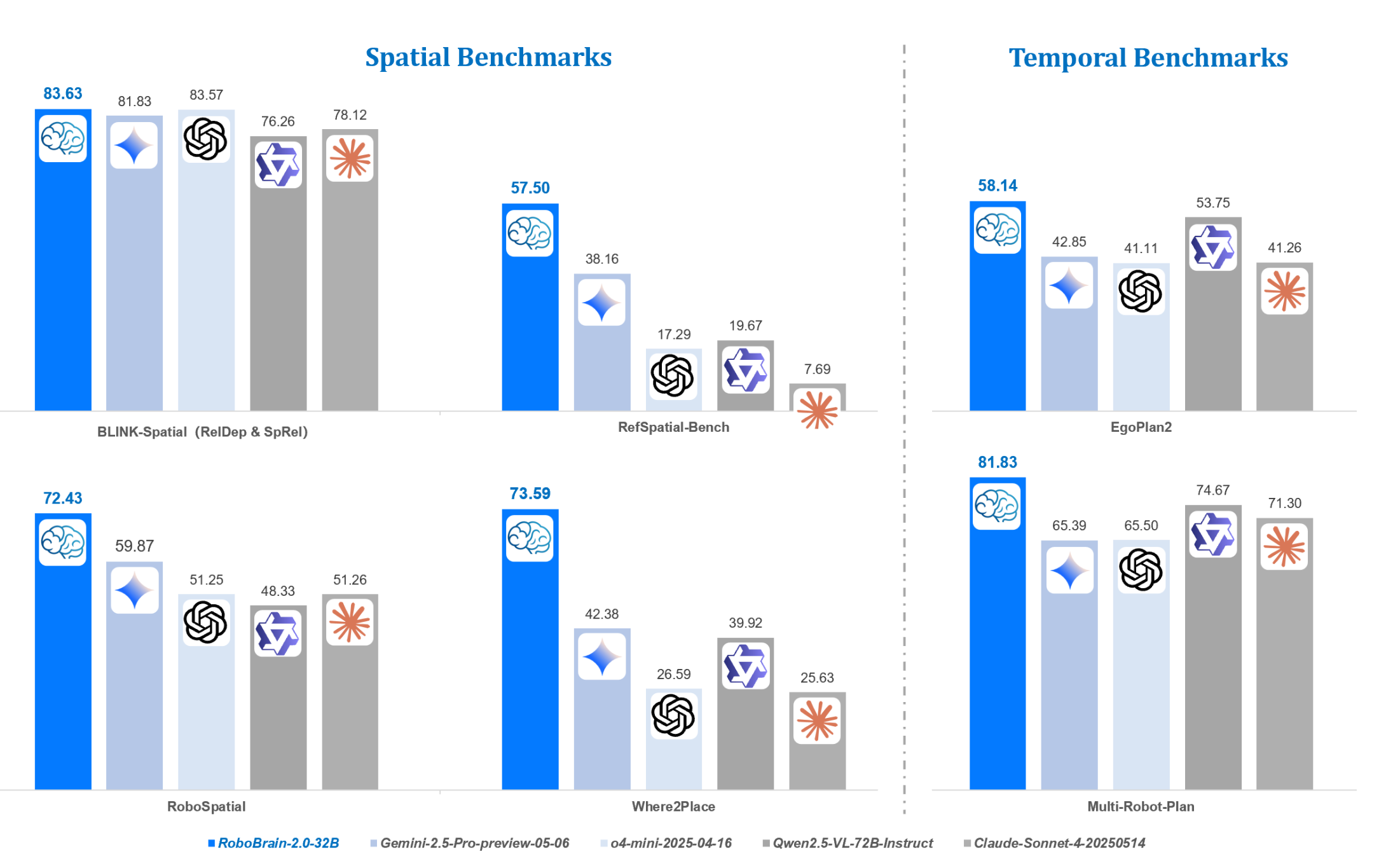
- 零样本迁移能力:在未微调情况下,模型在不同本体上的任务完成率(如仿真平台LIBERO中综合成功率达96.3%)。
- 小样本微调效率:对比基线模型(如π0),评估50条样本下的性能提升幅度。
- 控制一致性:测量不同本体执行同一任务时的动作序列相似度。
- 真实场景适应性:在复杂任务(如多目标处理、空间关系理解)中的成功率(真机评测达48.9%,是基线模型的2.5倍)。
应用领域
- 工业制造:机械臂协同装配、物流分拣。
- 服务机器人:家庭清洁、酒店递送、医疗陪护。
- 科研教育:机器人学习算法开发、具身智能教学。
- 特殊环境作业:灾害救援、空间探索等需要跨本体协作的场景。
项目地址
© 版权声明
文章版权归作者所有,未经允许请勿转载。
相关文章
暂无评论...
AI全网资源导航每日收集国内外热点AI/人工智能/工具/模型/框架以及最新的AI学习资料/课程等,在这个全新的AI时代,助力每一个人,赋能每一个具体业务场景,与所有人一起努力向前!
