Dreamer 4:DeepMind推出的新型世界模型智能体
AI智库导航-aiguide.cc为您提供最新的AI新闻资讯和最新的AI工具推荐,在这里你可以获得用于营销的AI聊天机器人、AI在商业管理中的应用、用于数据分析的AI工具、机器学习模型、面向企业的AI解决方案、AI在商业客户服务中的应用、AI和自动化工具等。
主要介绍
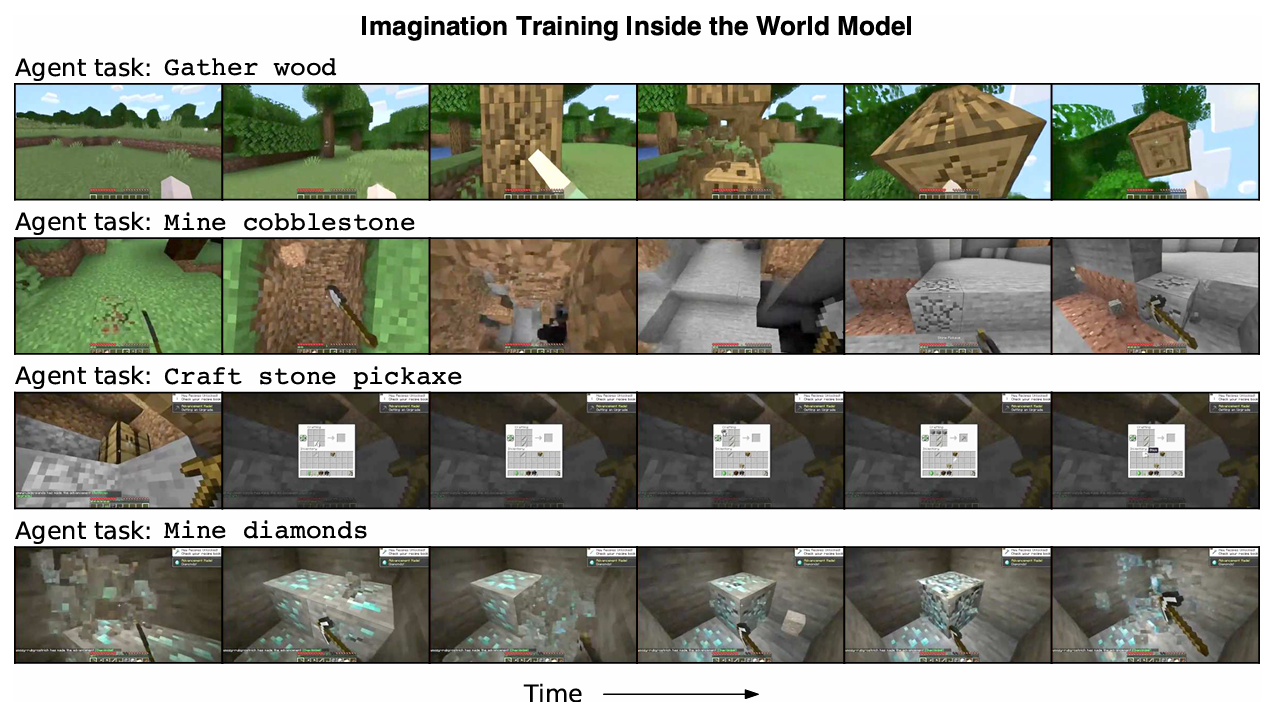
Dreamer 4是DeepMind推出的新型世界模型智能体,通过在快速且准确的世界模型中进行想象训练,解决复杂控制任务。作为首个仅依赖离线数据集(无需与环境交互)在《我的世界》游戏中成功获取钻石的智能体,它标志着世界模型从“紧凑内部表征”升级为“可离线学习、高保真、可交互的模拟宇宙”。其核心是通过模拟环境动态生成经验,使智能体在虚拟环境中完成决策优化,适用于游戏、机器人控制、自动驾驶等需要安全高效训练的场景。
功能特点
- 离线想象训练:仅需固定数据集即可训练,无需实时环境交互,降低在线试错成本。
- 高效Transformer架构:采用因果分词器(Causal Tokenizer)和交互式动力学模型,均基于Transformer,支持实时推理(单GPU可达21.4 FPS)。
- Shortcut Forcing目标:通过强制学习短推理路径减少误差累积,提升生成质量(FVD从306降至57)。
- 动作条件学习:少量标记动作数据(如100小时)即可达到全量数据85%以上的生成质量,支持从无标签视频中吸收知识。
- 泛化能力:在《我的世界》主世界(Overworld)训练的模型可泛化至未标注的下界(Nether)场景。
优缺点
- 优点:
- 安全性高:无需在线交互,避免物理机器人训练中的安全风险。
- 数据效率强:从无标签视频中学习通用知识,减少标注依赖。
- 泛化性广:支持跨场景任务迁移,如从游戏到机器人控制。
- 缺点:
- 技术门槛高:需深度理解Transformer架构与动力学模型,非技术用户难以直接应用。
- 复杂场景局限:在极端动态环境(如快速变化的现实场景)中性能可能下降。
主要应用场景
- 游戏AI:在《我的世界》等开放世界游戏中完成复杂任务(如采集钻石)。
- 机器人控制:通过模拟环境训练机械臂操作、导航等技能,降低硬件损耗风险。
- 自动驾驶:在虚拟环境中模拟驾驶场景,优化决策系统。
- 工业自动化:训练工厂机器人完成装配、质检等任务,减少停机调试时间。
使用方法
- 环境配置:克隆GitHub仓库(https://github.com/danijar/dreamer4),安装依赖库(如PyTorch、TensorFlow)。
- 数据准备:加载离线数据集(如《我的世界》VPT数据集),或通过掩码自编码技术处理无标签视频。
- 模型训练:使用Shortcut Forcing目标训练动力学模型,通过Tokenizer压缩视频帧为连续表示。
- 策略优化:在世界模型中插入任务输入,利用强化学习优化策略(如钻石采集路径规划)。
- 部署测试:在虚拟环境中验证模型性能,或通过API集成至实际系统(如机器人控制器)。
收费标准
Dreamer 4为开源项目,用户可免费下载、使用及修改代码,无隐藏费用或订阅制度。
官网地址
© 版权声明
文章版权归作者所有,未经允许请勿转载。
相关文章
暂无评论...
AI全网资源导航每日收集国内外热点AI/人工智能/工具/模型/框架以及最新的AI学习资料/课程等,在这个全新的AI时代,助力每一个人,赋能每一个具体业务场景,与所有人一起努力向前!
